TalTechi Kuressaare kolledži väikelaevaehituse kompetentsikeskusest alguse saanud iselaev NYMO saab sel suvel põhitöökoha Tallinna Sadama Vanasadama Admiraliteedi basseinis, kus iselaeva ülesandeks on merepõhja ja veealuse taristu seire. Üks oluline arengusamm tööde sujumiseks on NYMO automaatse laadimislahenduse loomine, et kogu töötsükkel sujuks ilma inimese sekkumiseta.
Laadimiskai loomine tähendab nii tarkvara kui ka riistvara arendamist ning prototüübi ehitamist. Iselaev peab suutma laadimiskaiga ühenduda erinevates mereoludes ning tingimustes. Põkkumiseks ja stabiilseks ühendumiseks peab laadimisdokk arvesse võtma GPS signaali võimalikku ebatäpsust, aitama alusel korrektselt joonduda ning töötama ühtviisi nii tasases vees kui ka lainetes.
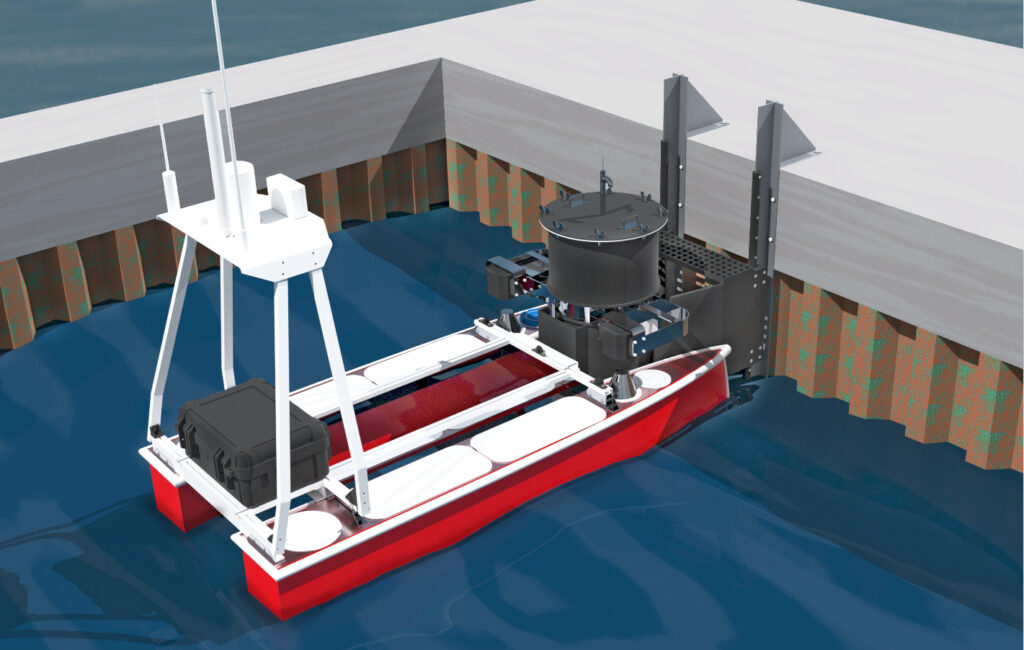
Laadimine toimub juhtmevabade kontaktplaatide abil, mille asend tuleb tagada piisava täpsusega. Lahendus põhineb muudetava süvisega silindrilisel dokil, kus erinevad juhtpinnad ja koonused tagavad laeva ja doki omavahelisel paiknemise täpsuse. Omavaheline lukustus toimib elektromagnetiliste lukkude abil.
Ehkki esimesed katsed tehakse lainete eest suhteliselt kaitstud Admiraliteedi basseinis, omab lahendus potentsiaali ka avamerel autonoomsete laevade laadimiseks.
Laadimisdoki arendamise pearõhk on ettevõtetel MindChip ja MEC Insenerilahendused. Iselaeva laadimiskai arendamisel osaleb ka kolm TalTechi tudengit, nende hulgas Taaniel Reimers Kuressaare kolledži meretehnika ja väikelaevaehituse õppekavalt. Taaniel pani paberile laadimiskai esimeste visioonide visandid ja koostab sel teemal oma lõputöö. Taanieli juhendaja on professor Kristjan Tabri.
Laadimisdoki väljatöötamist ja sadamakatsete läbiviimist rahastatakse Euroopa Liidu Horizon 2020 R&D programmi RIMA (Robotics for Inspection and Maintenance) abil.